1. What is an interrupt?
Basically CPU executes the instructions of the program one by one, doing what it is told in a precise and linear way. An interrupt disturbs this order. Coming maybe when least expected, its function is to alert the CPU that some significant external event has happened, to stop it from what it is doing and force it (at greatest speed possible) to respond to what has happened. Originally this was applied to allow emergency external events to get the attention of the CPU, emergencies like power failure, the system overheating or major failure of a subsystem. Then CPU takes necessary actions2. What is an ISR? What command is used in PIC to return from an ISR?
ISR is interrupt service routine so that basically handle the necessary actions should be taken when some interrupt happens. We can use ISR by configuring following few steps
ü Start the ISR at the interrupt vector, location 0004
ü Enable the interrupt that is to be used, by setting the enable bit in the INTCON register
ü Set the Global Enable bit, GIE
ü Clear the interrupt flag within the ISREnd the ISR with a retfie instruction. RETFIE is exactly like a return, but it also sets the global interrupt enable (GIE). When a hardware interrupt occurs, it clears GIE and executes what amounts to a CALL instruction. Using RETFIE allows us to enable interrupts and return to the main program all in one step
3. What is Interrupt Latency?
The purpose of the interrupt is to attract the attention of the CPU quickly, but actually how quickly does this happen? The time between the interrupt occurring and the CPU responding to it is called the latency. Actually this is based on hardware configurations of the device4. What are Interrupt flag bits and mask bits?
Flag bits-The occurrence of the interrupt, even if it is only momentary, is thus recorded. The output of the bistable, the latched version of the interrupt, is called the interrupt flag. This is then gated with an enable signal, Interrupt is enable. Basically we checked flag bits to detect weather interrupt is occurs or not
Mask bits- These bits are used to select which interrupts can be enable. Some interrupts can turn off and turn on. So do that we can use those bits. The action of disabling an interrupt is sometimes called masking. some microcontrollers have interrupts that cannot be masked. These are always external and are used to connect to external interrupt signals of the greatest importance
5. What is the bit that needs to be set in order to enable External interrupt on RBO (0th bit of PortB)?
bsf intcon,inte
And we must select global interrupt enable bit6. What are timers? What is a pre-scalar?
We can use timers to maintain periodic events. Timers provide the timing for a range of activity such as motor controlling and various other applications
The external input path includes the option of inverting the signal with the Exclusive OR gate, the inversion being controlled by bit T0SE which is appear in option register. The output of the first multiplexer branches before reaching a second multiplexer. This selects either a direct path or the path taken through a programmable prescaler.we can set 1 trigger for 255 triggers by setting this
7. What is a watch dog timer?
Big problem of computer system is that the software fails in some way and that the system locks up or becomes unresponsive. In a desktop computer such lock-up can be annoying and one would normally have to reboot. In an embedded system it can be disastrous, as there may be no user to notice that there is something wrong and maybe no user interface anyway. If we enable this timer it’s perioditically counting up and it reaches top value of it then it reset the program (reset means go to the beginning of the program) if we neet to avoid reset we have to clear that by our program time to time.
Interrupts' and their usage in pic microchip circuit design
Timer0 interrupt generation Assembly code for microchip pic16f877
list p=16f877
include <dev_fam.inc> ;this file is checked and corrected
include <math16.inc> ;
include <p16f877.inc>
;**********************************************************
;DEFINITIONS:CONSTANTS
FALSE equ 0
TRUE equ 1
PP0 equ b'00000000' ;PIC program page
PP1 equ b'00001000'
PP2 equ b'00010000'
PP3 equ b'00011000'
;------------------------------------------------------------
; RAM variables
ORG 0X20
;-------------------------------------------------------------
PROGRAMPAGE set PP0
org 0x00 ;RESET VECTOR
goto start ;RUN main routine
org 0x04 ;Interrupt VECTOR
;you can enter your interrupt check routines here
goto ISR
;------------------------------------------------------------------
org 0xA0
start
;code for Initialization of Timer0 and other bits
BANKSEL INTCON ;BANK2
MOVLW 0xA0
MOVWF INTCON ;Global interrupt and TMR0 interrupt enabled
;set timer 0
banksel TMR0
movlw b'00000000'
movwf TMR0
;get one timer 0 inturrupt after 256 triggers
banksel OPTION_REG
movlw b'10000110'
movwf OPTION_REG
;set port B as output
banksel TRISB
movlw b'11110000'
movwf TRISB
banksel PORTB
movlw b'00000000'
movwf PORTB
loop
;loops forever until inturrupts come
goto loop
ISR
;handling the interrupt
comf PORTB,1 ; Toggle Port B
BANKSEL INTCON ;BANK0
BCF INTCON,2 ;CLEAR INTERRUPT FLAG
Retfie ;return and set global in turrupt enable
end
--------------------------------------------------------------------------
Interrupt service routine handler- programmable Integrated circuit
When trigger switch connected to int/RB0 that will start counting 0 to 10 we can get out put from RA0 toRA3 as 0000 to 1010 use with pic = 16F84
org 0x00 ;This is where we come on power up and reset
;*******************SETUP CONSTANTS*******************
INTCON EQU 0x0B ;Interrupt Control RegisterPORTB EQU 0x06 ;Port B register address
PORTA EQU 0x05 ;Port A register address
TRISA EQU 0x85 ;TrisA register address
TRISB EQU 0x86 ;TrisB register address
STATUS EQU 0X03 ;Status register address
COUNT EQU 0x0c ;This will be our counting variable
TEMP EQU 0x0d ;Temporary store for w register
goto main ;Jump over the interrupt address
;***************INTERRUPT ROUTINE***************
org 0x04 ;This is where PC points on an interrupt
movwf TEMP ;Store the value of w temporarily
incf COUNT,1 ;Increment COUNT by 1, and put the result
;back into COUNT
movlw 0x0A ;Move the value 10 into w
subwf COUNT,0 ;Subtract w from COUNT, and put the
;result in w
btfss STATUS,0 ;Check the Carry flag. It will be set if
;COUNT is equal to, or is greater than w,
;and will be set as a result of the subwf
;instruction
goto carry_on ;If COUNT is <10, then we can carry on
goto clear ;If COUNT is >9, then we need to clear it
carry_on
bcf INTCON,0x01 ;We need to clear this flag to enable
;more interrupts
movfw TEMP ;Restore w to the value before the interrupt
retfie ;Come out of the interrupt routine
clear
clrf COUNT ;Set COUNT back to 0
bcf INTCON,1 ;We need to clear this flag to enable
;more interrupts
retfie ;Come out of the interrupt routine
;*******************Main Program*********************
main
;*******************Set Up The Interrupt Registers****
bsf INTCON,7 ;GIE – Global interrupt enable (1=enable)
bsf INTCON,4 ;INTE - RB0 Interrupt Enable (1=enable)
bcf INTCON,1 ;INTF - Clear FLag Bit Just In Case
;*******************Set Up The Ports******************
bsf STATUS,5 ;Switch to Bank 1
movlw 0x01
movwf TRISB ;Set RB0 as input
movlw 0x10
movwf TRISA ;Set R 0 to RA3 on PortA as output
bcf STATUS,5 ;Come back to Bank 0
;*******************Now Send The Value Of COUNT To Port A
loop
movf COUNT,0 ;Move the contents of Count into W
movwf PORTA ;Now move it to Port A
goto loop ;Keep on doing this
end ;End Of Program

if you need more details go to http://www.mstracey.btinternet.co.uk
There many more things about pic and interrupt service routine .This works for me with Mplab ide and proteous 7 environment
Nuwan added this:
1. You use RC OSC and no capacitor. (R1 and OSC1) This is ok with some pic's but, some are fail. You use distributed capacitance of Rosc pin and it is better to connect 20pF cap to ground.
2. RB0 ,Int 0 RC low pass filter R2 value is too large. Use between 2K ~ 10K value.
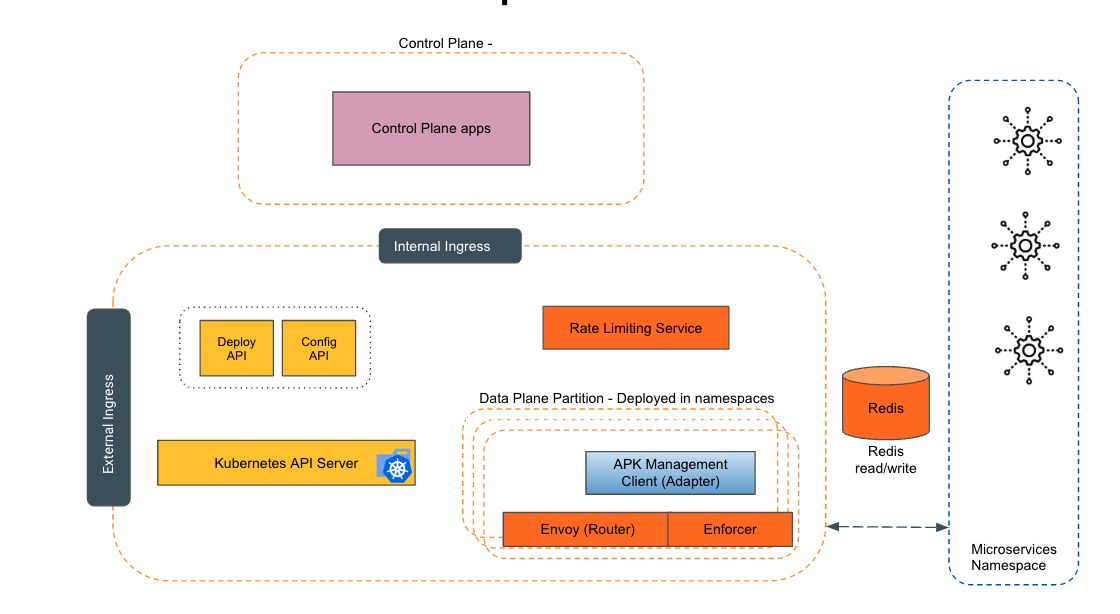
Empowering the Future of API Management: Unveiling the Journey of WSO2 API Platform for Kubernetes (APK) Project and the Anticipated Alpha Release
Introduction In the ever-evolving realm of API management, our journey embarked on the APK project eight months ago, and now, with great a...
-
First you have to download the font file "filename.ttf" to you machine. Then you need some permissions to add those files to fold...
-
Remove current installation of Nginx sudo apt-get purge nginx nginx-common nginx-full Install Nginx sudo apt-get install nginx Edit c...
-
 Here i'm explaining solution for manage multiple API Manager environments and external key management server to build central API r...
Here i'm explaining solution for manage multiple API Manager environments and external key management server to build central API r...